
Segafan
Computershit
Compiling
Atlanta*
Windows
Androiding
MySites
Los Angeles
WebBuilderNotes
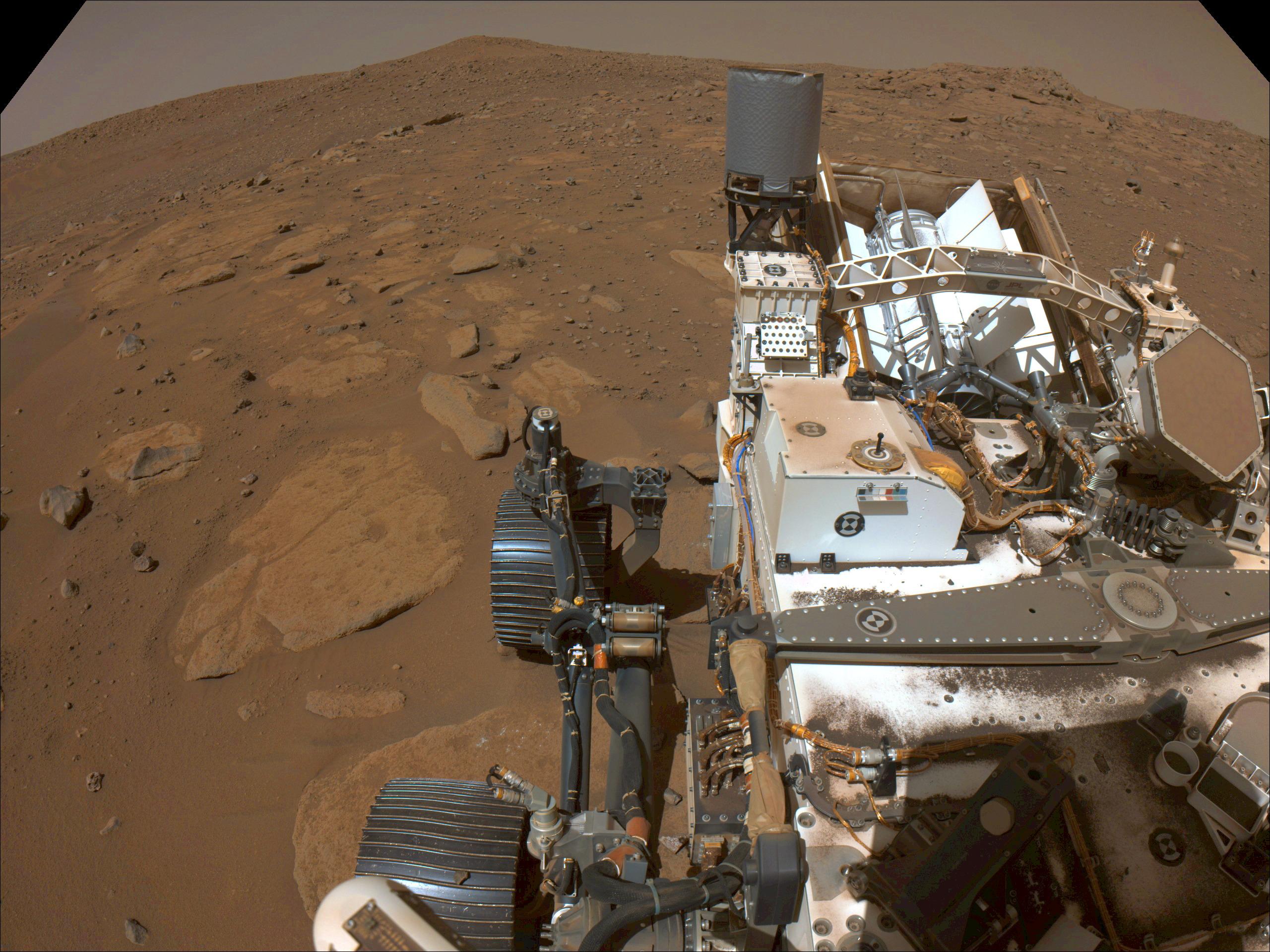
Mars2020 Today
CovidDump
EuropaClipper
Worklog
HelioPhysics
BAKERSFiELD
Using Mermaid Dot Js
Welcome to Jekyll!

GreyHound 1999
Computer School
1999, Erika thats where i went to learn PC repair @whitehouse @blackgirlscode they closed now, we workd so hard together, I was the youngest at 18 on paper now that i have more information on my origin i may have been 14… Coral seem kindabig



img[src*="ZR0_1320_0784114966_193EBY_N0612534ZCAM04024_1100LMJ01_1200.jpg"] {width: 100%;
border-bottom:solid 10px #BF785E50;
filter: contrast(200%);
}Dear_Normani re:WorkDayMoodiness
For Loops with FeaturePost
{% for post in site.posts %}
{{ post.title }}
</div>{% endfor %}
JPL and the Space Age: Destination Moon @nasa-jpl i was watching it at the duratn hollywood library and when i was looking at my github page for sharig it shut off #sessionjacked ucla: birthplace of the internet How to roll back Git code to a previous commit Jekyll Array
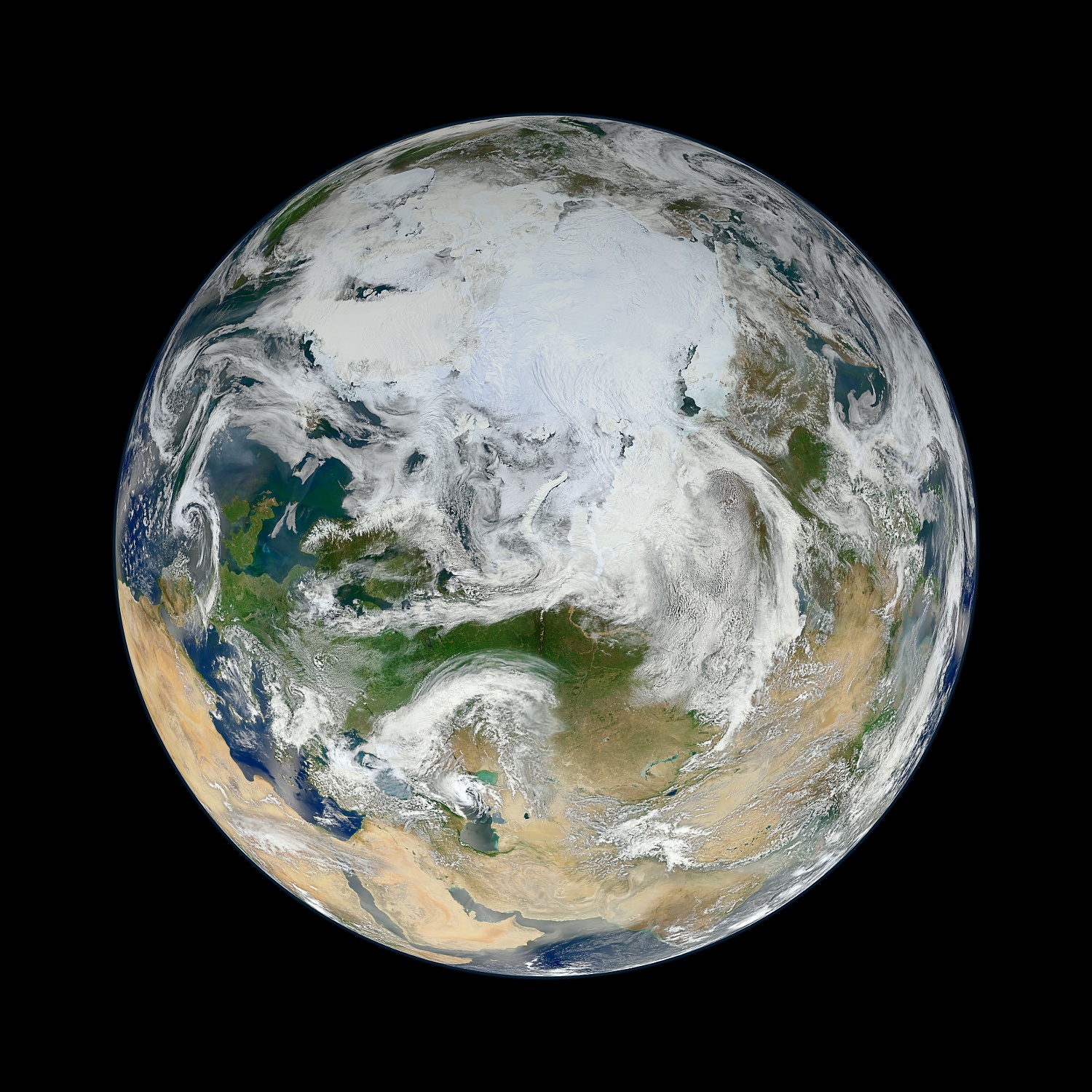
The View from the Top
A new composite image built from 15 satellite passes shows the Arctic and northern latitudes as you have never seen them before.
Image by Norman Kuring, NASA/GSFC/Suomi NPP. Caption by Michael Carlowicz. Suomi NPP is the result of a partnership between NASA, NOAA and the Department of Defense.
Published June 22, 2012 Data acquired May 26, 2012
Solid Steel Radio Show: Mixed by DK, Strictly Kev, PC, The Butch Cassidy Sound System (Nov 22, 2004)
GitHub Branching
gitGraph:
commit "normani"
branch newbranch
checkout newbranch
commit id:"1218"
commit tag:"test"
checkout main
commit type: HIGHLIGHT
commit
merge newbranch
commit
branch b2
commit
Tracking Elephants Across Namibia
 Solid Steel presents DJ Food & DK - “Now, Listen!” (full mixed CD)
Atlas - Plaetary Data System
Solid Steel presents DJ Food & DK - “Now, Listen!” (full mixed CD)
Atlas - Plaetary Data System
Rashard Kelly NasaJpl MRO JUNO iSS
![]()
![]()


{kind=link}
Definition lists can be used with HTML syntax.
- Name
- Rashard(Thaka) Iman Kelly
- Born
- 1980
- Birthplace
- North America
- Color
- BruisedOrange

Pioneer 10 (originally designated Pioneer F) is a NASA space probe launched in 1972 that completed the first mission to the planet Jupiter.[6]
/PDS/CATALOG/
PDS_VERSION_ID = PDS3 LABEL_REVISION_NOTE = “2006-07-24, R. Sharrow, initial; 2006-12-15, S. Slavney, reformatted & revised; 2007-07-30, S. Slavney, Aerobraking subphases” RECORD_TYPE = STREAM
OBJECT = MISSION MISSION_NAME = “MARS RECONNAISSANCE ORBITER”
OBJECT = MISSION_INFORMATION MISSION_START_DATE = 2005-08-12 MISSION_STOP_DATE = UNK MISSION_ALIAS_NAME = “MRO” MISSION_DESC = “
Mission Overview ================
The Mars Reconnaissance Orbiter spacecraft was launched from Cape
Canaveral Air Force Station on 12 August 2005 aboard a Lockheed-Martin
Atlas V-401 launch vehicle. After a five-month cruise and a two-month
approach to Mars, MRO entered Mars' orbit on 10 March 2006 and began
aerobraking. The primary science phase began on 8 November, 2006. The
primary science phase is planned to last one Mars year (approximately two
Earth years), after which an extended mission may be scheduled.
Note: This description has been written early in the Primary Science
Phase of the MRO mission. It will be revised at least once by the
end of the mission.
Mission Phases ==============
The Mars Reconnaissance Orbiter Mission is divided in time into six
phases: Launch, Cruise, Approach and Orbit Insertion, Aerobraking,
Primary Science, and Relay.
LAUNCH
------
Launch extended from the start of the countdown to the initial
acquisition, by the DSN, of the orbiter in a safe and stable
configuration.
The baseline launch vehicle for the MRO mission was the Lockheed-Martin
Atlas V 401. This launch vehicle was selected by NASA-KSC (Kennedy
Space Flight Center) via a competitive procurement under the NASA
Launch Services (NLS) contract. The Atlas V 401 was a two-stage
launch vehicle consisting of the Atlas Common Core Booster and a
single engine Centaur upper stage. The Centaur upper stage could
perform multiple restarts of its main engine. For precise pointing and
control during coast and powered flight, the Centaur used a flight
control system that was 3-axis stabilized. The Atlas large payload
fairing was used to protect MRO during the Atlas boost phase. This
fairing had a diameter of 4.2m and a length of 12.2m.
The launch and injection of MRO occured during the Mars opportunity
of August 2005. The Atlas booster, in combination with the Centaur
upper stage, delivered the MRO spacecraft into a targeted parking
orbit. After a short coast, a restart of the Centaur upper stage
injected MRO onto an interplanetary transfer trajectory.
Mission Phase Start Time : 2005-08-12
Mission Phase Stop Time : 2005-08-12
CRUISE
------
Duration: About five months. The cruise phase extended from DSN
initial acquisition, in a safe and stable configuration, until two
months prior to the Mars Orbit Insertion (MOI) maneuver. Primary
activities during cruise included spacecraft and payload checkout and
calibration. These activities, along with daily monitoring of orbiter
subsystems, were performed in order to fully characterize the
performance of the spacecraft and its payload prior to arrival at
Mars. In addition, standard navigation activities were performed
during this flight phase, the first being the largest TCM performed
fifteen days after launch.
Mission Phase Start Time : 2005-08-12
Mission Phase Stop Time : 2006-01-10
APPROACH AND ORBIT INSERTION
----------------------------
This phase extended from two months prior to Mars Orbit Insertion
(MOI), through MOI, and until the orbiter was checked out and ready to
begin aerobraking. The orbiter was inserted into a nearly polar orbit
with a period of 35 hours.
During the last sixty days of the interplanetary transit, spacecraft
and ground activities were focused on the events necessary for a
successful arrival and safe capture at Mars. Navigation techniques
included the use of delta-DOR measurements in the orbit determination.
This technique yielded a precise determination of the inbound
trajectory with a series of final TCMs used to control the flight path
of the spacecraft up to the MOI maneuver.
Also during the approach phase, MRO performed the Optical Navigation
experiment. This involved pointing the optical navigation camera
(ONC) at the moons of Mars - Phobos and Deimos, and tracking their
motion. By comparing the observed position of the moons to their
predicted positions, relative to the background stars, the ground was
able to accurately determine the position of the orbiter.
Upon arrival at Mars on March 10, 2006, the spacecraft performed its
MOI maneuver using its six main engines. MOI inserted the spacecraft
into an initial, highly elliptical capture orbit. The delta-V
required to accomplish this critical maneuver was 1015 m/s and took
about 26 minutes to complete. For most of the burn, the orbiter was
visible from the DSN stations. The signal was occulted as the orbiter
went behind Mars, and appeared again a short time later. The reference
MRO capture orbit had a period of 35 hours and a periapsis altitude of
300km. The orientation of the ascending node was 8:30 PM LMST. The
capture orbit was been selected such that aerobraking would be
completed prior to the start of solar conjunction (September 23,
2006).
Mission Phase Start Time : 2006-01-10
Mission Phase Stop Time : 2006-03-10
AEROBRAKING
-----------
The Aerobraking Phase of the mission consisted of three sub-phases,
Aerobraking Operations, Transition to PSO Operations, and Solar
Conjunction.
Aerobraking Operations Sub-Phase
--------------------------------
One week after MOI, aerobraking operations commenced. During this
time period, the orbiter used aerobraking techniques to supplement its
onboard propulsive capability and to reduce its orbit period to that
necessary for the primary science orbit (PSO). Aerobraking Operations
consisted of a walk-in phase, a main phase, and a walkout phase, and
was followed by a transition to the PSO. During the walk-in phase, the
spacecraft established initial contact with the atmosphere as the
periapsis altitude of the orbit was slowly lowered. The walk-in phase
continued until the dynamic pressures and heating rate values required
for main phase, or steady state aerobraking, were established. During
the main phase of aerobraking operations, large scale orbit period
reduction occurred as the orbiter was guided to dynamic pressure
limits. Main phase aerobraking continued until the orbit lifetime of
the orbiter reached 2 days. (Orbit lifetime is defined as the time it
takes the apoapsis altitude of the orbit to decay to an altitude of
300km.) When the orbit lifetime of the orbiter reached 2 days, the
walkout phase of aerobraking operations began. During the walkout
phase, the periapsis altitude of the orbit was slowly increased as the
2 day orbit lifetime of the orbiter was maintained. Once the orbit of
the orbiter reached an apoapsis altitude of 450km, the orbiter
terminated aerobraking by propulsively raising the periapsis of its
orbit out of the atmosphere.
Because the PSO had nodal orientation requirements, the aerobraking
phase of the MRO mission had to proceed in a timely manner and be
completed near the time the desired nodal geometry was achieved. After
approximately 4.5 months of aerobraking, the dynamic pressure control
limits were reset such that the orbiter will fly to the desired 3:00
pm LMST nodal target.
Transition to PSO Operations Sub-Phase
--------------------------------------
Once the orbit apoapsis altitude was reduced to 450 km, the orbiter
terminated aerobraking by raising periapsis to a safe altitude and
begin a transition to the Primary Science Phase. The periapsis of
the transition orbit rotated around Mars from over the equatorial
latitudes to the North Pole. When periapsis reached the North Pole,
apoapsis was reduced propulsively to 255 km and orbit rotation stopped
- the orbit was frozen with periapsis over the South Pole and apoapsis
over the North Pole. The SHARAD antenna and the CRISM cover were
deployed, the instruments were checked out and remaining calibrations
were performed. The payloads collected data in their normal operating
modes to ensure that the end-to-end data collection and processing
systems worked as planned.
Solar Conjuction Sub-Phase
--------------------------
Orbiter activities in preparation for science were then temporarily
suspended during a four week period surrounding solar conjunction.
Mission Phase Start Time : 2006-03-17
Mission Phase Stop Time : 2006-11-07
Aerobraking Operations Sub-Phase Start Time: 2006-03-17
Aerobraking Operations Sub-Phase Stop Time: 2006-09-15
Transition to PSO Operations Sub-Phase Start Time: 2006-09-15
Transition to PSO Operations Sub-Phase Stop Time: 2006-10-09
Solar Conjunction Sub-Phase Start Time: 2006-10-09
Solar Conjunction Sub-Phase Stop Time: 2006-11-07
PRIMARY SCIENCE
---------------
The 255 x 320 km Primary Science Orbit (PSO) is a near-polar orbit
with periapsis frozen over the South Pole. It is sun-synchronous with
an ascending node orientation that provides a Local Mean Solar Time
(LMST) of 3:00 p.m. at the equator. Because of the eccentricity of
the Mars orbit around the Sun, true solar time varies by nearly 45
minutes over the course of one Mars year.
The Primary Science Phase of the mission began after solar conjunction
and after turn-on and checkout of the science instruments in the
Primary Science Orbit. The phase started on 8 November 2006, will
extend for one Mars year, and will conclude prior the next solar
conjunction near the end of 2008.
The science investigations are functionally divided into daily global
mapping and profiling, regional survey, and globally distributed
targeting investigations. The global mapping instruments are the MCS
and the MARCI. The targeted investigations are HiRISE, CRISM, and
CTX. The survey investigations are CRISM and CTX (in survey modes),
and SHARAD. The global mapping instruments require nadir pointing,
low data rate, and continuous or near-continuous operations. The
global mapping investigations are expected to use less than 5% of the
expected downlink data volume. The targeted and survey instruments
are high data rate instruments and will require precise targeting in
along-track timing and/or cross-track pointing for short periods of
time over selected portions of the surface. It is expected that more
than 95% of the available downlink data volume will be used for
targeted and survey investigations. All instruments can take data
simultaneously.
Toward the end of the primary science phase, other Mars missions
launched in the 2007 opportunity will begin to arrive. Phoenix, the
first of the Mars Program's Scout missions has been selected to launch
in the 2007 Mars opportunity. Phoenix, a lander mission that will
collect and analyze subsurface ice and soil material, will arrive in
late May 2008. Phoenix will need MRO to characterize its prime landing
site choices early in the Primary Science Phase. MRO will provide
relay support for Entry, Descent, and Landing (EDL) activities and for
telecommunications late in the PSP after Phoenix arrives at Mars.
Phoenix and MRO will also coordinate some observations to maximize
science return to the Mars Exploration Program. Another mission, the
Mars Science Laboratory (MSL) is currently proposed for launch in
2009, with arrival in 2010, during the MRO Relay Phase.
MSL will need MRO to provide and characterize candidate landing sites
using observations taken during the MRO PSP. (Final certification of
the prime MSL landing sites may require limited observations by the
science payload in 2009 during the Relay phase. However, this has not
been committed to by MRO) MRO will also provide EDL support and relay
telecommunications for MSL. During the primary science phase, periodic
instrument calibrations will be performed to verify the measurement
characteristics, stability and health of the instruments. At the
conclusion of the Primary Science Phase, these calibrations will be
repeated, so that the final instrument characteristics are known.
NASA may approve, as resources and on-orbit capability permit,
continuation of science observations beyond the Primary Science Phase
until end of the Relay Phase (also End of Mission). The orbiter will
remain in the Primary Science Orbit during the Relay Phase.
Mission Phase Start Time : 2006-11-08
Mission Phase Stop Time : 2008-11-09
RELAY
-----
MRO will provide critical relay support to missions launched as part
of the Mars Exploration Program after MRO. For spacecraft launched in
the 2007 opportunity, this relay support will occur before the end of
the MRO Primary Science Phase. Following completion of the Primary
Science Phase, MRO will continue to provide critical relay support for
Mars missions until its end of mission.
While all of the missions that MRO will support have not yet been
selected, Phoenix, the first of the Mars Program's Scout missions has
been selected to launch in the 2007 Mars opportunity. Phoenix, a
lander mission that will collect and analyze soil samples, will arrive
in late May 2008. It will need science imaging support for site
characterization and selection and relay support for its Entry,
Descent and Landing activities and for its science data return.
Another mission, the Mars Science Laboratory (MSL) is proposed for the
2009 Mars opportunity. MSL will also need science imaging support for
site characterization and selection and relay support for EDL and
science data return. The MRO Mission Plan describes the generic
support activities for any mission as well as current early planning
in support of Phoenix and MSL. Activities regarding site
characterization and selection will be described as part of the
Primary Science Phase, and activities regarding relay support will be
described as part of the Relay Phase.
The orbiter has been designed to carry enough propellant to remain
operational for 5 years beyond the end-of-mission (EOM) on December
31, 2010 to support future MEP missions. As this is beyond the EOM,
no activities have been planned for this time period. To ensure that
the orbiter remains in a viable orbit during this time, its orbit
altitude will be increased at EOM to about 20 km inside the orbit of
the Mars Global Surveyor spacecraft.
The MRO approach to planetary protection differs from any previous
Mars orbiter. The NASA requirements for planetary protection,
NPG8020.12B, allow a class III mission, like MRO, to use either the
'probability of impact/orbit lifetime' or a 'total bio burden'
approach. Implementing the Level 1 MRO requirements with the
instruments selected via the NASA AO requires low orbits whose
lifetimes are incompatible with a 'probability of impact/orbit
lifetime' approach to Planetary Protection. Therefore, MRO is
implementing the requirements of NPG8020.12B using the 'total
bio-burden' approach. This approach has been documented in the MRO
Planetary Protection Plan (D-23711). The details of cleaning
requirements are documented in the MRO Planetary Protection
Implementation Plan, MRO 212-11, JPL D-22688. The MRO launch targets
will be biased away from a direct intercept course with Mars to ensure
a less than 1 in 10,000 chance of the launch vehicle upper stage
entering Mars atmosphere.
The End-of-Mission (EOM) is planned for December 31, 2010 just prior
to the third solar conjunction of the mission. The orbiter will
perform a propulsive maneuver to place itself in a higher orbit to
increase the orbit lifetime and enable extended mission operations.
Mission Phase Start Time : 2008-11-09
Mission Phase Stop Time : 2010-12-31 "
MISSION_OBJECTIVES_SUMMARY = "
The driving theme of the Mars Exploration Program is to understand the role of water on Mars and its implications for possible past or current biological activity. The Mars Reconnaissance Orbiter (MRO) Project will pursue this ‘Follow-the-Water’ strategy by conducting remote sensing observations that return sets of globally distributed data that will: 1) advance our understanding of the current Mars climate, the processes that have formed and modified the surface of the planet, and the extent to which water has played a role in surface processes; 2) identify sites of possible aqueous activity indicating environments that may have been or are conducive to biological activity; and 3) thus identify and characterize sites for future landed missions.
The MRO payload is designed to conduct remote sensing science observations, identify and characterize sites for future landers, and provide critical telecom/navigation relay capability for follow-on missions. The mission will provide global, regional survey, and targeted observations from a low 255 km by 320 km Mars orbit with a 3:00 P.M. local mean solar time (ascending node). During the one Martian year (687 Earth days) primary science phase, the orbiter will acquire visual and near-infrared high-resolution images of the planet’s surface, monitor atmospheric weather and climate, and search the upper crust for evidence of water. After this science phase is completed, the orbiter will provide telecommunications support for spacecraft launched to Mars in the 2007 and 2009 opportunities. The primary mission will end on December 31, 2010, approximately 5.5 years after launch.
Science Questions Addressed —————————
The MRO mission has the primary objective of placing a science orbiter
into Mars orbit to perform remote sensing investigations that will
characterize the surface, subsurface and atmosphere of the planet and
will identify potential landing sites for future missions. The MRO
payload will conduct observations in many parts of the electromagnetic
spectrum, including ultraviolet and visible imaging, visible to
near-infrared imaging spectrometry, thermal infrared atmospheric
profiling, and radar subsurface sounding, at spatial resolutions
substantially better than any preceding Mars orbiter. In pursuit of
its science objectives, the MRO mission will:
- Characterize Mars' seasonal cycles and diurnal variations of water,
dust, and carbon dioxide.
- Characterize Mars' global atmospheric structure, transport, and
surface changes.
- Search sites for evidence of aqueous and/or hydrothermal activity.
- Observe and characterize the detailed stratigraphy, geologic
structure, and composition of Mars surface features.
- Probe the near-surface Martian crust to detect subsurface structure,
including layering and potential reservoirs of water and/or water ice.
- Characterize the Martian gravity field in greater detail relative to
previous Mars missions to improve knowledge of the Martian crust and
lithosphere and potentially of atmospheric mass variation.
- Identify and characterize numerous globally distributed landing sites
with a high potential for scientific discovery by future missions.
In addition, MRO will provide critical telecommunications relay
capability for follow-on missions and will conduct, on a
non-interference basis with the primary mission science, telecom and
navigation demonstrations in support of future Mars Exploration
Program (MEP) activities. Specifically, the MRO mission will:
- Provide navigation and data relay support services to future MEP
missions.
- Demonstrate Optical Navigation techniques for high precision delivery
of future landed missions.
- Perform an operational demonstration of high data rate Ka-band
telecommunications and navigation services.
Designed to operate after launch for at least 5.4 years, the MRO
orbiter will use a new spacecraft bus design provided by Lockheed
Martin Space Systems Company, Space Exploration Systems Division in
Denver, Colorado. The orbiter payload will consist of six science
instruments and three new engineering payload elements listed as
follows:
Science Instruments
- HiRISE, High Resolution Imaging Science Experiment
- CRISM, Compact Reconnaissance Imaging Spectrometer for Mars
- MCS, Mars Climate Sounder
- MARCI, Mars Color Imager
- CTX, Context Camera
- SHARAD, Shallow (Subsurface) Radar
Engineering Payloads
- Electra UHF communications and navigation package
- Optical Navigation (Camera) Experiment
- Ka Band Telecommunication Experiment
To fulfill the mission science goals, seven scientific investigations
teams were selected by NASA. Four teams (MARCI, MCS, HiRISE, and
CRISM) are led by Principal Investigators (PI), each responsible for
the provision and operation of a scientific instrument and the
analysis of its data. The MARCI PI and Science Team also act to
provide and operate, as Team Leader (TL) and Team Members, the CTX
facility instrument that will provide context imaging for HiRISE and
CRISM, as well as acquire and analyze independent data in support of
the MRO scientific objectives. The Italian Space Agency (ASI) will
provide a second facility instrument, SHARAD, for flight on MRO. ASI
and NASA have both selected members of the SHARAD investigation team.
In addition to the instrument investigations, Gravity Science and
Atmospheric Structure Facility Investigation Teams will use data from
the spacecraft telecommunications and accelerometers, respectively, to
conduct scientific investigations.
The MRO shall accomplish its science objectives by conducting an
integrated program of three distinct observational modes:
- Daily global mapping and profiling observations
- Regional survey observations, and
- Globally distributed, targeted observations
These observation modes will be intermixed and often overlapping.
Some instruments have more than one observational mode. In addition,
many targeted observations will involve nearly simultaneous,
coordinated observations by more than one instrument. This program of
scientific observation will be carried out for one Mars year or more
in order to characterize the full seasonal variation of the Martian
climate and to target hundreds of globally distributed sites with high
potential for further scientific discovery.
Mission Success Criteria ————————
The following mission success criteria have been established for the
MRO Project. The mission success criteria are described and controlled
in the MRO Project Implementation Plan.
For Full Mission Success, the following criteria must be met:
- Operate the orbiter and all six (6) science instruments in the
Primary Science Orbit in targeting, survey and mapping modes, as
appropriate, over the one Mars year of the Primary Science Phase;
conduct the gravity and accelerometer investigations. Each science
instrument shall have capabilities that meet or exceed their
respective science instrument requirements.
- Return, over the one-Mars-year Primary Science Phase, representative
data sets for each instrument for a total science data volume return
of 26 Tbits or more. Included in the returned data volume shall be
information describing hundreds of globally distributed targets.
- Process, analyze, interpret, and release data in a timely manner,
including archival of acquired data and standard data products in the
PDS within 6 months of acquisition or as negotiated in the Science
Data Management Plan (JPL D22218).
- Conduct relay operations for U.S. spacecraft launched to Mars in the
2007 and 2009 opportunities.
For Minimum Mission Success, the following criteria must be met:
- Operate the orbiter and its science payload in targeting, survey and
mapping modes, as appropriate, in the Primary Science Orbit during the
one-Mars-year of the Primary Science Phase; conduct gravity and
accelerometer investigations. Science instruments shall have
capabilities that meet their respective science instrument
requirements.
- Return 10 Tbits of science data from HiRISE or CRISM or from their
combined operations, plus 5 Tbits of representative science data over
the one-Mars-year Primary Science Phase from at least 3 of the 4 other
instruments (CTX, MARCI, MCS, SHARAD); conduct gravity and
accelerometer investigations. Included in the returned data volumes
shall be information describing 100 or more globally distributed
targets.
- Process, analyze, interpret, and release data in a timely manner,
including archival of acquired data and standard data products in the
PDS.
- Conduct relay operations for U.S. spacecraft launched to Mars in the
2007 and 2009 opportunities. "
END_OBJECT = MISSION_INFORMATION
OBJECT = MISSION_HOST INSTRUMENT_HOST_ID = MRO OBJECT = MISSION_TARGET TARGET_NAME = MARS END_OBJECT = MISSION_TARGET END_OBJECT = MISSION_HOST
OBJECT = MISSION_REFERENCE_INFORMATION REFERENCE_KEY_ID = “UNK” END_OBJECT = MISSION_REFERENCE_INFORMATION
END_OBJECT = MISSION
END

![]()
The Noodle Incident ~-~ TheReinventedWheel
body {
margin: 0px 0px 0px 0px;
padding: 0px 0px 0px 0px;
font-family: verdana, arial, helvetica, sans-serif;
color: #ccc;
background-color: #333;
text-align: center;
/* part 1 of 2 centering hack */
}
#content {
width: 400px;
padding: 10px;
margin-top: 20px;
margin-bottom: 20px;
margin-right: auto;
margin-left: auto;
/* opera does not like 'margin:20px auto' */
background: #666;
border: 5px solid #ccc;
text-align:left;
/* part 2 of 2 centering hack */
width: 400px; /* ie5win fudge begins */
voice-family: "\"}\"";
voice-family:inherit;
width: 370px;
}
html>body #content {
width: 370px; /* ie5win fudge ends */
}

layout: default title: HoleToAnotherUniVersE